

Andrey a fabriqué lui même son treuil parapente autonome

Interview d’Andrey par ROCK THE OUTDOOR
Tout d’abord, je souhaiterai que tu te présentes et tu me racontes ton histoire parapente en quelques mots
Je m’appelle Andrey Bresski. Je suis né en Biélorussie et je vis actuellement dans notre capitale, Minsk. Je travaille dans une entreprise privée en tant qu’ingénieur. Notre société fabrique des meubles rembourrés comme des canapés, des fauteuils, des lits et similaires.
Depuis mon enfance, j’aime le bricolage. Plus tard, je suis tombé amoureux du modélisme aviation et j’en suis toujours un grand fan. Curieusement, mon histoire d’amour avec le parapente a commencé en France. Il y a eu une période dans ma vie où j’ai vécu et travaillé à Paris (de 2001 à 2010). J’ai rencontré des amis qui rêvaient aussi de faire du parapente, et, en 2008, mon copain français a acheté un parapente d’occasion du « siècle dernier » pour l’entraînement et les vols courts. C’est avec ce parapente que je me suis envolé pour la première fois (voir photo de droite). Après, j’ai pratiqué mais avec des ailes plus modernes mais c’est une autre histoire…

Comment t’es venue cette idée de créer ton propre système de treuil autonome ?
Malgré mon histoire de vol assez longue, mon niveau de pilote est resté à un niveau moyen car je n’avais tout simplement pas assez de temps pour le pratiquer régulièrement. Il y avait plusieurs raisons à cela. En 2010, je suis retourné dans mon pays. En Biélorussie, à mon grand regret, il n’y a pas de montagnes, pas même de petites collines d’au moins 30-50 mètres de hauteur ! Nous trouvons des forêts, des champs, des marais, des ravins, des terres hautes, mais ici, le décollage n’est possible que via un treuil ou un paramoteur. Nous avons aussi une très petite communauté de parapentistes. Il y a donc un petit nombre de treuils et leur accès n’est malheureusement pas toujours possible à votre première demande. Donc, vous pouvez comprendre que le désir de voler de façon autonome ne sort pas de nulle part !
Un jour, j’ai trouvé une vidéo clip sur YouTube (voir à droite) qui m’a donné un espoir de devenir autonome. Cependant, le prix de cet appareil était exhorbitant. Ses caractéristiques techniques laissaient également beaucoup de place à l’amélioration. Au fil du temps, la base élémentaire des appareils électriques dans le domaine des moteurs électriques s’est grandement améliorée. Grâce à nos amis chinois, les prix deviennent plus acceptables pour une expérimentation sans douleur.
Comment ton projet a mûri au moment de la conception (choix des pièces et des matériaux) ?
C’est en 2015 que j’ai sérieusement pensé à construire mon propre treuil. À l’époque, je n’avais pas trouvé de projet sur Internet et YouTube à l’exception de Skynch (voir vidéo à droite). Par conséquent, j’ai exploré différents types de treuils déjà existants : hydraulique, scooter et autres options exotiques ! Je dirai que la conception de mon treuil n’est pas la plus optimale en termes de poids-dimensions pour un treuil autonome.

Peux-tu décrire les grandes lignes de fabrication de ton système et le choix définitif des matériaux?
Lors de la conception du treuil, j’ai calculé la puissance nécessaire pour voler dans le pire des cas. En résumé, voici les conditions suivantes : en l’absence de vent, la traction moyenne développée par le treuil est de 80 kg à une vitesse d’enroulement de 10 m/s. Cela correspond à environ 8 kW de puissance mécanique. Par conséquent, le moteur électrique doit fournir une puissance électrique d’au moins 10 kW. Parce que 10kW est un objectif assez élevé, j’avais besoin d’un moteur à plus haute tension pour réduire le courant. J’ai décidé de prendre le moteur de la tension d’alimentation autour de 75V. En ce qui concerne la batterie, j’ai pris des batteries au plomb bon marché, car je ne me souciais pas de minimiser le poids. Je pourrais simplement transporter les batteries dans ma voiture, alors pourquoi ne pas économiser de l’argent.

6 batteries pour fournir les 75 V
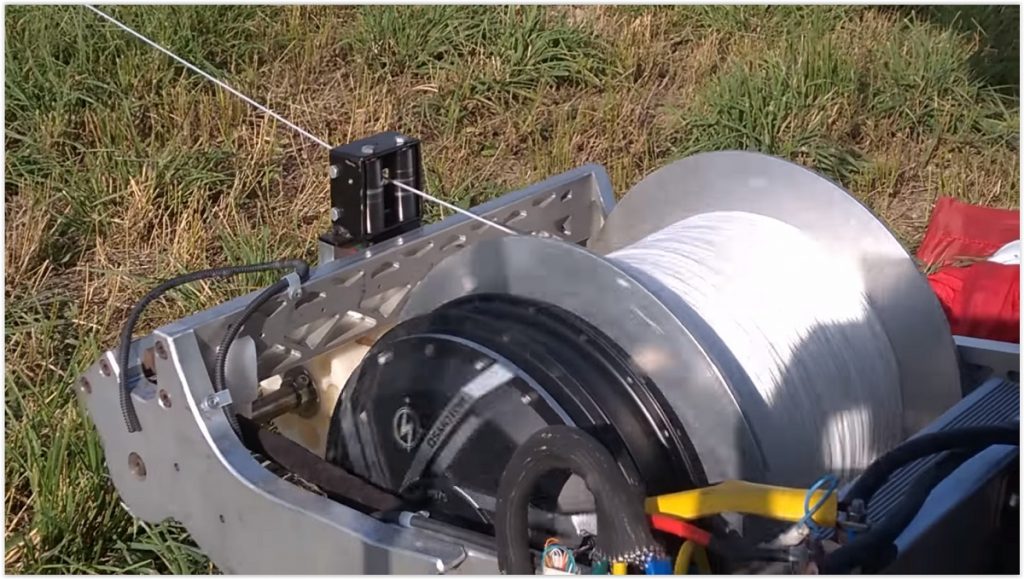
Le prochain choix était le moteur. Je considérais les options suivantes: un petit moteur avec un réducteur par rapport à un moteur à entraînement direct plus lourd. Parce que l’utilisation d’un réducteur est assez difficile, j’ai opté pour un moteur à entraînement direct. En cherchant un moteur peu coûteux, j’ai trouvé le constructeur chinois QS Motor. J’ai également trouvé cette vidéo YouTube où le protagoniste a utilisé la même roue avec beaucoup de succès. Cela m’a aussi donné de l’espoir pour mon projet.
En décembre 2015, la roue a été livrée. À ce moment-là, j’avais presque fini de concevoir la mécanique du treuil. J’avais seulement besoin d’appliquer les dimensions exactes du moteur au dessin, puis j’ai commencé à construire le treuil. Le matériau le plus simple et le plus pratique à cet effet est l’alliage d’aluminium. Depuis que j’ai eu accès à des fraiseuses CNC dans l’entreprise où je travaille, il m’a été facile de traiter toutes les pièces nécessaires en aluminium . Ensuite, j’ai commandé les travaux de tournage chez un fournisseur. Voici ce que j’ai finalement créé (voir vidéo à droite)

Tu sais que les treuilleurs suivent une formation de treuilleur car c’est technique et cel présente des risques. Quelles sont les précautions pour utiliser ton treuil autonome ?
Afin de rendre le treuil autonome, je devais satisfaire au moins à ces deux conditions:
-
- le treuil devrait être capable de fournir la traction requise
- être contrôlé à distance.
Premièrement, pour assurer la traction, il suffit de stabiliser le courant du moteur à un niveau prédéfini. Cela peut être géré par un contrôleur pour le transport électrique qui a un limiteur de courant maximal du moteur. En conséquence, à plein régime, vous obtiendrez une traction constante indépendamment de la vitesse de coupe. Le niveau limite actuel déterminera le niveau de poussée. Il est vrai qu’un tel contrôleur a plusieurs limites d’utilisation avec le treuil. La limite la plus sérieuse est la force du vent, car si le vent provoque l’arrêt de la roue, le contrôleur va soudainement couper la traction, ce qui n’est pas très agréable, surtout à basse altitude. À une hauteur suffisante, vous donnez juste une seconde commande et continuez à grimper si le vent le permet.
Deuxièmement, pour le contrôle à distance, j’ai utilisé un contrôle radio commandé moderne à bas prix avec une bonne gamme de canaux. Enfin, ayant rassemblé tous ces modules et en les combinant avec un microprocesseur auxiliaire comme Arduino, j’ai pu créer un contrôle pour le treuil.
Il était également important pour moi de libérer le pilote des cordelettes inutiles, car le pilote en a déjà trop. Un autre problème à éviter est un contrôle supplémentaire sur le treuil. Par conséquent, j’ai créé un seul bouton pour contrôler le treuil – tirer / éteindre – en dehors des boutons de mise sous/hors tension du module radio commande. Au début, l’électronique augmente progressivement la traction en aidant le pilote à soulever l’aile, puis au bout de 10 secondes, il atteint sa pleine traction.
Bien entendu, il serait pratique que le treuil enroule automatiquement le câble après le désengagement du pilote. Cette fonction est déjà disponible, mais n’est pas très stable. Par conséquent, je préfère ne pas l’utiliser jusqu’à ce que je réussisse à résoudre tous les problèmes. Actuellement, le câble doit être rembobiné sous le contrôle du pilote.


– Que pensent les pilotes qui ont vu le système et ceux qui l’ont déjà utilisé?
Mon treuil a été testé par plusieurs pilotes de la communauté locale. Comme tous nos pilotes possèdent une vaste expérience de vol sur des treuils de différents modèles, leurs commentaires ont été très précieux. Tous les pilotes ont évalué le treuil très positivement. Le treuil électrique se sent comme un hydro-treuil actif, mais la traction est encore plus douce selon tous les pilotes. Dans l’ensemble, ils l’ont beaucoup aimé.

– Tu as publié 5 vidéos. Ce sont des versions différentes ? Quels sont les points de faiblesse et les améliorations que tu as apportées?
Ce ne sont pas 5 versions, mais cinq vidéos sur le même treuil. Fondamentalement, ce sont des tests différents effectués alors que j’améliorais l’apparence du treuil. En ce qui concerne les améliorations mises en œuvre, il y avait principalement des bugs électroniques et logiciels corrigés. En dehors de cela, je voudrais affiner l’enroulement automatique du câble comme je l’ai mentionné ci-dessus.

– Si, après les tests, ton système se montre fiable, prévois-tu de le commercialiser ? Si oui, as-tu une fourchette de prix ?
Je n’ai jamais prévu de commercialiser mon projet. Pour moi, c’est une partie de mon hobby afin de pouvoir pratiquer le parapente de manière autonome. La version actuelle du treuil est encore très brute à la fois mécaniquement et électroniquement. C’est bien pour une utilisation personnelle, mais pas assez pour aller jusqu’à la commercialisation. J’ai dépensé environ 2000 USD sur tout, sans compter mes efforts. Ce treuil s’avêre être assez lourd. En outre, le contrôleur pour le transport électrique impose un certain nombre de restrictions à l’utilisation. Je ne les mentionnerai pas tous en détail, car ils nécessitent trop d’explications techniques. À ce jour, il y a une offre commerciale d’un gars : Miami paragliding Leur produit est de conception simple et prêt à l’emploi. Les amateurs de treuil peuvent donc en prendre note. Cependant, je ne suis pas sûr de ce qu’il y a exactement dans la partie électronique du treuil et si il fonctionne très bien.
Après avoir découvert mon treuil, un groupe de personnes en Russie a commencé à construire son propre treuil électrique. Leur objectif est de construire un contrôleur spécialisé pour l’électromoteur du treuil, ce qui permettra d’éliminer tous les bugs sur lequel je me bats actuellement. S’ils réussissent, je commencerai à construire une deuxième version de mon treuil, deux fois plus léger et plus petit. J’ai déjà tout conçu, le matériel est acheté, il ne reste plus qu’à attendre que le contrôleur soit complet par ce groupe d’enthousiastes. Ce projet sera probablement commercialisé, mais il est trop tôt pour parler de prix maintenant !
